Research
您的位置: 首页 >> 研究方向
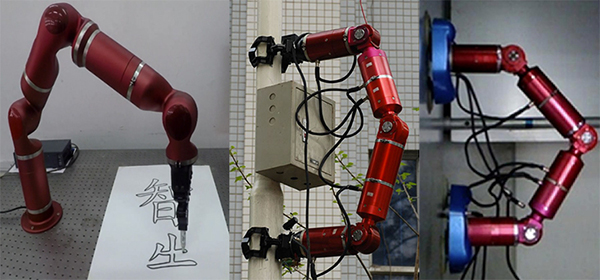
我们研究的双足爬壁机器人是实验室自主研发的模块化机器人的其中一种构型。该机器人由五个对称分布的主体关节模块组成机器人主体,两个吸附模块作为末端功能模块。
模块机器人(Modular Robots)是由标准的相互独立的制造模块组成,每个模块有驱动部分、动力源等。不同的模块组合在一起,由一个信息的控制系统控制,构成具有特殊功能的机器人。模块化机器人由于其可重构性,关节组合多样化等优点,在机器人研究领域具有重大研究价值,在生产生活的各种应用中也有重大前景。
基于多传感融合,研究多机器人系统在协作过程中,工作环境的非设定变化时的自主、实时应对方法。
Copyright © 2011-2018 BIRL
Biomimetic and Intelligent Robotics Lab