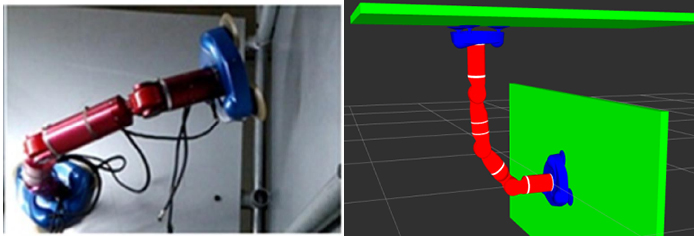
我们研究的双足爬壁机器人是实验室自主研发的模块化机器人的其中一种构型。该机器人由五个对称分布的主体关节模块组成机器人主体,两个吸附模块作为末端功能模块。

该机器人具有五个自由度和两个壁面吸附装置,在壁面攀爬和壁面过渡上具有良好的运动性能。目前已开展的研究有爬壁机器人壁面吸附控制,吸附模块对壁面的自主调节与吸附,爬壁机器人的运动性能与运动步态分析,爬壁机器人基于空间壁面环境的路径规划,还有避障或者越障运动以及壁面过渡运动中的轨迹规划等等。我们的最终目标是对空间壁面环境进行构图建模,并使得爬壁机器人在环境中根据目标位置自主攀爬。
Copyright © 2011-2018 BIRL
Biomimetic and Intelligent Robotics Lab

