模块化机器人以其通用性、可重构、可扩展性、低成本、容错和自修复等诸多优良特性正逐步成为机器人系统研发的热点。仿生与智能机器人实验室(BIRL)瞄准这一前沿领域,历经十余年的研发与技术突破,已开发出具有较大优势和极大特色的第三代模块化机器人系统(如下图所示)。
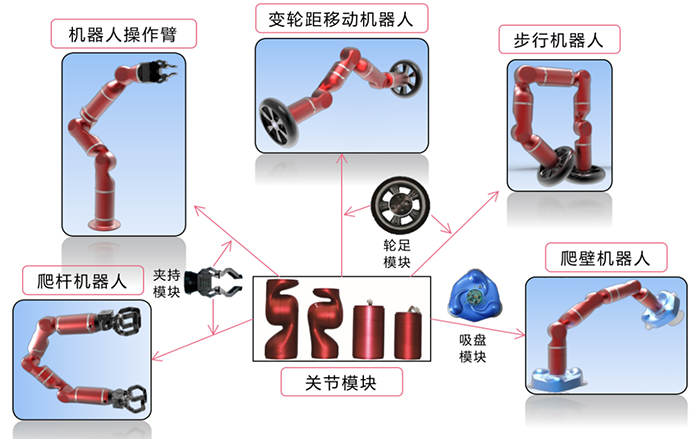
第三代模块化机器人系统
BIRL模块化机器人系统以关节模块(I/T型关节)和末端功能模块(夹持器模块、轮足模块和吸附模块)为基本单元,根据不同任务与需求选取若干个机器人关节模块依次连接构成对应构型的本体,再配以相应末端功能模块形成具有最大任务适应性的机器人系统。如上图所示,通过选用不同种类不同数量的关节模块与末端功能模块构型成了机器人操作臂Mobot、爬壁机器人W-Climbot、爬杆机器人P-Climbot、变轮距移动机器人Whebot和双足步行机器人Wabot等多个不同任务场景下的机器人系统。
其中,模块化机器人操作臂作为模块化机器人系统的代表参加了国家十二五科技成果展等多个大型展览,并在2016醒狮杯国际工业设计大赛“创新应用设计组-工业机器人系统”比赛中荣获金奖。另外,模块化机器人系统作为科研平台在多家科研院所和高校正发挥着越来越大的研究和社会价值。

模块化机器人操作臂在国家十二五科技成果展

模块化机器人操作臂参加醒狮杯国际工业设计大赛
操作臂机器人Mobot书写“智造”网址链接:http://v.youku.com/v_show/id_XMzQ4OTg3MTEyNA==.html
操作臂机器人Mobot书写 “中国梦”网址链接:http://v.youku.com/v_show/id_XMzQ4OTg0NDE2MA==.html
Copyright © 2011-2018 BIRL
Biomimetic and Intelligent Robotics Lab

